Project -1.

Material: All material using for this project is ESD type.
Schedule: 4 April - 16 June 2017.
The guide line for job:
1. Design the singulator to let the product from flexlink conveyor going in to SCA dispense machine one by one. (Waiting until the pallet design come out).
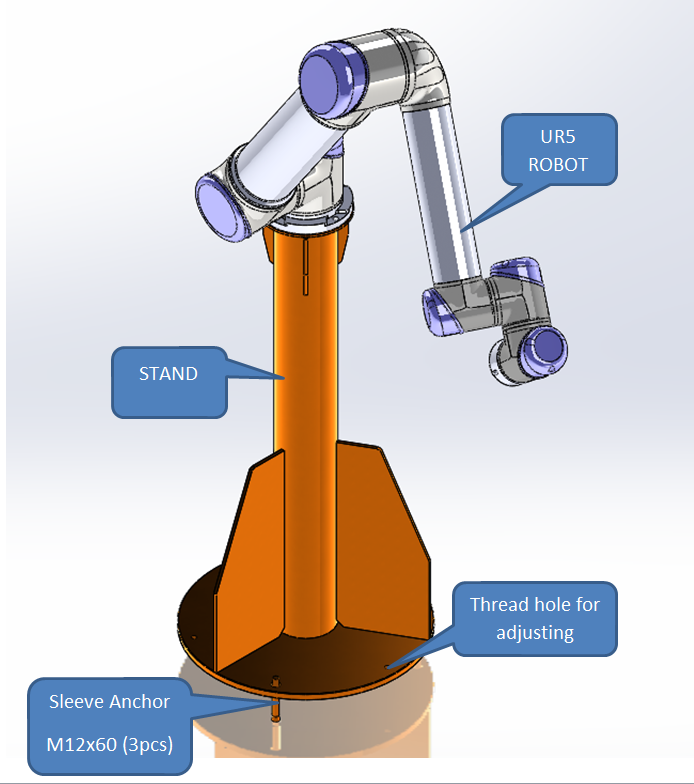
2. Design the stand to mount for UR5 Robot (without vision camera)
- Pick and place product from flexlink conveyor to dispense machine (2 products every time).
- Pick and place product after process from dispense machine if product:
- Fail: then put to the reject tray
- Audit: Then put to the audit tray
- Ok: Then put back to flexlink conveyor for the next process
- So total we have 4+6+4 = 14 positions.
3. Design the reject & audit station can put at least 5 products (extra 1 line).
- Using continuous conveyor to load product.
- Using 3 sensor for detect: 1 thru beam sensor behind, 2 reflective sensor in the front.
- Using ESD (Electrostatic discharge materials) belt type.
- Material for all side guide is ESD type.
4. Design bracket to mount scanner on the flex link conveyor to scan product, after process from dispense machine.
- Design the lift up mechanism to lift the product behind (50mm) to make sure the scanner can scan the 2d barcode.
5. Design the enclosure with 3 doors to cover up UR 5 robots, flexlink conveyor and reject station.
6. Using Yumi robot (ABB) to cover up the cap for product.

* User manual for UR5 robot: UR5 robot.
* Link 3d for UR5 robot: 3D
Done:
2. The stand (concept) for UR5 robot (07/04/2017).
No comments:
Post a Comment